Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
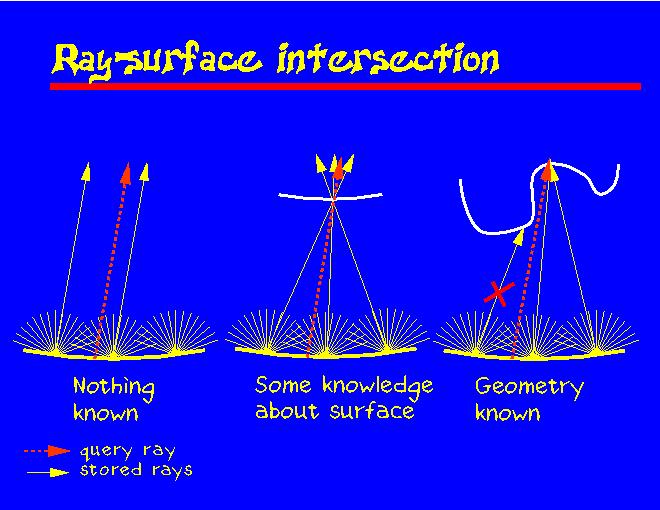
First, it would be nice to know which rays see the same surface point as is visible through a particular pixel in a virtual viewer. We call that ray the query ray and have drawn it in orange.
In the first case we don't have any information about the object geometry. All we can do is to look for rays that are parallel to and as close to the query ray as possible. Typically we cannot expect to find an exact match to the query ray, and the returned rays will intersect the surface at slightly different locations. This is in essence the situation in the light-field rendering system.
In the second image we have some idea where the surface might be. We can estimate where the query ray intersects the object surface and look for rays that aim toward that point. The expected error is now lower. This is roughly what the Lumigraph system does.
Finally, if we have a fairly accurate surface representation, we can find the surface intersection point more accurately, and can sometimes even detect if some of the rays can't see that point due to self-occlusion.