Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
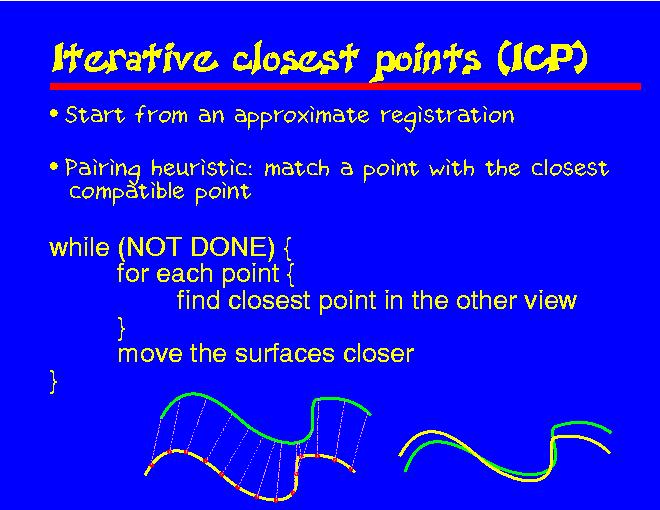
The most widely used method for registration is called the ICP, or the iterative closest points method. The correspondence problem is solved by assuming the surfaces are already fairly close and by pairing each point with the closest point in the other view. The hope is that as the surfaces move closer, the pairing heuristic produces better point pairs, and with better pairs it is possible to move the surfaces closer, and so on.