Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
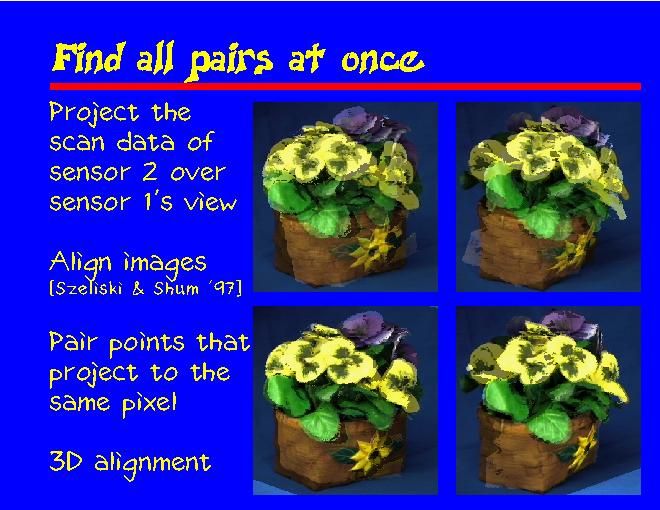
Our solution allows us the find all the pairs at once.
Here we have the color image of camera one, with the colored range data from camera two superimposed over it (top left). We also have the data from camera one projected over the color image of camera two (top right). Our idea is to align these superimposed images (using an algorithm by Szeliski and Shum in SIGGRAPH '97) and pair data points that project to the same pixel in an image. Then we can perform the 3D alignment essentially as is done in ICP. The result is that the algorithm converges in two to five iterations, as opposed 50 or more, which is typical with regular ICP.