Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
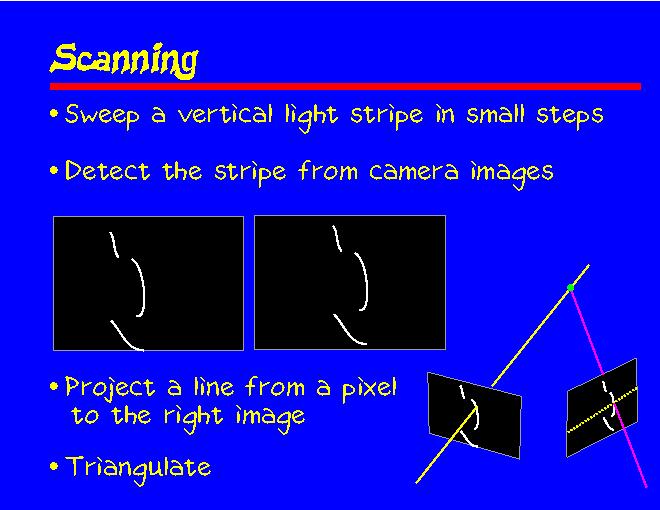
The surface coordinates are extracted by sweeping a vertical light stripe in small steps across the scene. The two images show how the scene looks to the cameras.
If we can match a pixel in the left image with a pixel in the right image, we can calculate the 3D coordinates of the surface point that is visible through that pixel. We do this by taking a pixel illuminated by the stripe in the left image, figure out the 3D line that projects to that pixel, project that line onto the other camera image (this projection is called the epipolar line), and see where the epipolar line intersects the stripe on the right image. The picture on the right illustrates how the surface point is triangulated.
All the image is digitized in the same manner. Finally, we turn the lights on (and the beam off) and take a color image.