Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
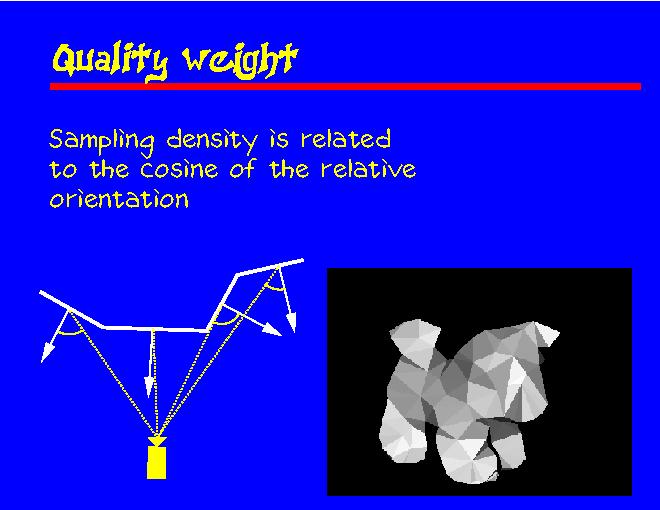
The next weight relates in some sense to the quality of the data. As shown in the diagram, the sensor can get much better sampling of surfaces that are perpendicular to its viewing direction. The sampling density is directly related to the cosine of the angle between the surface normal and a vector from the surface to the camera. We calculate and apply that weight separately for each triangle
The image on the right shows the weight over a mesh: the brighter the color, the higher the weight.
This weight does not change when the virtual camera moves.