Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
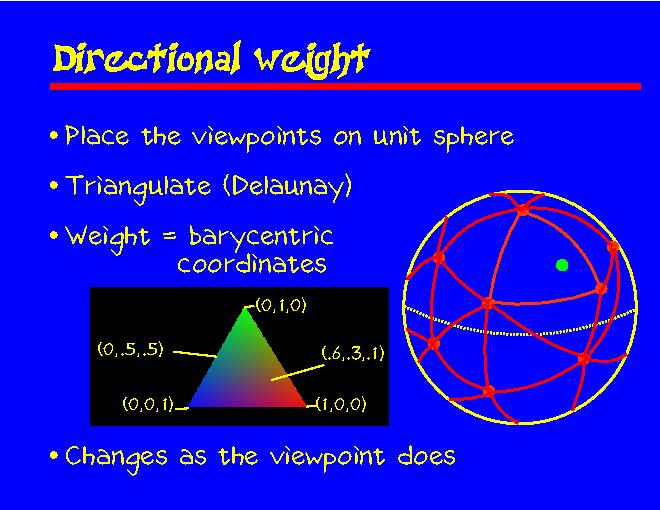
The first weight is related to the relative viewing directions of the virtual camera and input views.
We mark the input views based on their viewing directions as dots on a unit sphere. Then we calculate a Delaunay triangulation for those dots.
We then place the virtual camera on the sphere based on its current viewing direction. We are only going to use the three views at the corners of the triangle containing the virtual camera. Their relative influences are determined by the barycentric coordinates of the new dot. The colored triangle illustrates some properties of the barycentric coordinates: basically the coordinates just linearly interpolate the vertices.
Notice that this weight changes dynamically as the object or the camera moves.