Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
I actually didn't present this slide in the conference, I just had it in case of a question about an earlier related method.
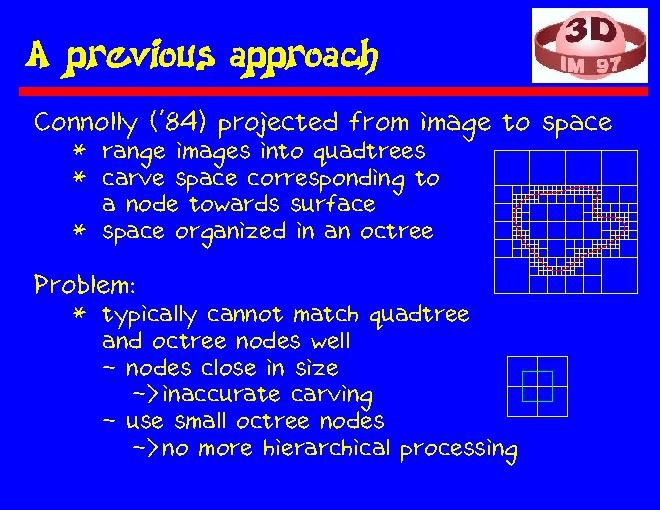
What Connolly did was that he organized the range maps into quadtrees. The problem there is that the quadtree nodes are likely to be quite small for the part of a range map that falls onto the object surface, only in the background there can be large nodes. But this problem only relates to efficiency. A more important problem is that they did the space carving from the range data to the volume. Now there is a problem of mismatch of size and location of an image quadtree node and volume octree node. One either gets sloppy carving or looses most of the advantages of hierarchical processing.
We, on the other hand, project from the volume to the range image, and do not suffer from these problems.