Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
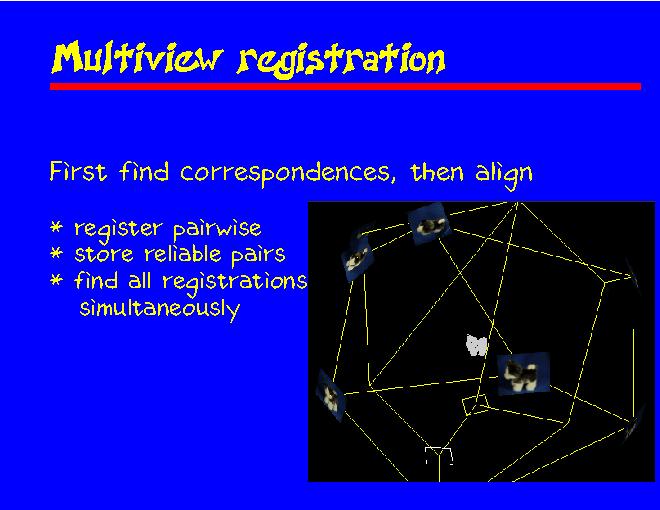
Our solution is to clearly separate the correspondence determination and alignment subproblems.
First, each view is registered pairwise with several neighboring views. After the views are in good alignment, it is easy to determine a set of reliable point pairs, and store them.
Finally, we can find all the registrations simultaneously. For example, we can use the algorithm in the previous slides, but since no new searches are needed, the solution is found very fast. Further, assuming the pairwise registrations were correct, it is very unlikely that the algorithm converges into a false local minimum.