Zippered Polygon Meshes from Range Images
Greg Turk and
Marc Levoy,
Proc. SIGGRAPH '94 (Orlando, Florida, July 24-29, 1994). In
Computer Graphics
Proceedings, Annual Conference Series, 1994, ACM SIGGRAPH, pp. 311-318.
Abstract:
Range imaging offers an inexpensive and accurate means for digitizing the
shape of three-dimensional objects. Because most objects self occlude, no
single range image suffices to describe the entire object. We present a
method for combining a collection of range images into a single polygonal mesh
that completely describes an object to the extent that it is visible from the
outside.
The steps in our method are: 1) align the meshes with each other using a
modified iterated closest-point algorithm, 2) zipper together adjacent meshes
to form a continuous surface that correctly captures the topology of the
object, and 3) compute local weighted averages of surface positions on all
meshes to form a consensus surface geometry.
Our system differs from previous approaches in that it is incremental; scans
are acquired and combined one at a time. This approach allows us to acquire
and combine large numbers of scans with minimal storage overhead. Our largest
models contain up to 360,000 triangles. All the steps needed to digitize an
object that requires up to 10 range scans can be performed using our system
with five minutes of user interaction and a few hours of compute time. We
show two models created using our method with range data from a commercial
rangefinder that employs laser stripe technology.
Additional information available:
-
Plain text of full paper
(41 Kbytes)
-
Postscript of full paper with low-res figures
(956 Kbytes)
-
PDF of full paper with low-res figures
(475 Kbytes)
-
Figure 7: Zippering a phone
(TIFF, 485 Kbytes)
-
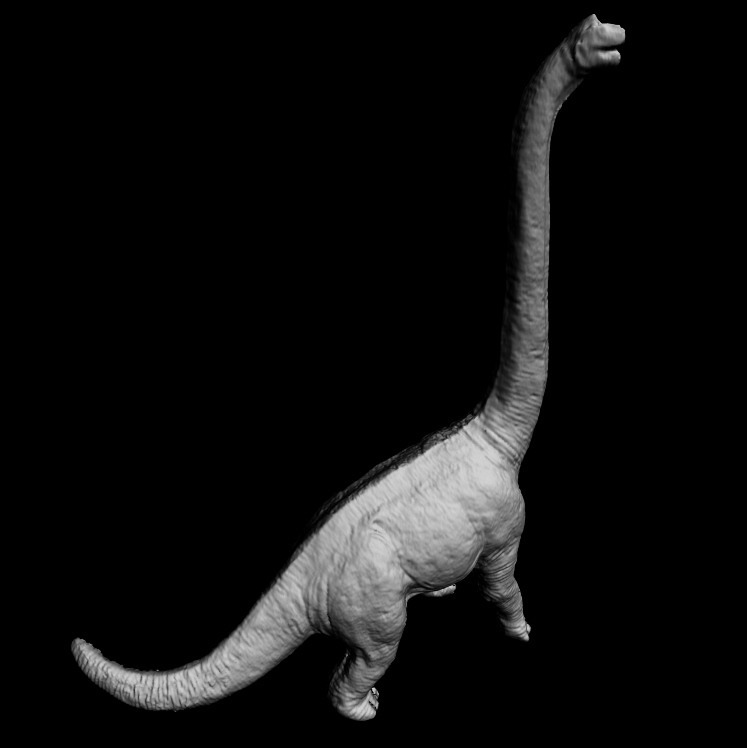
Figure 8: Photo of a toy dinosaur
and a zippered mesh of the model
(TIFF, 1.6 Mbytes)
-
Figure 9: Zippered phone model
before and after consensus geometry
(TIFF, 160 Kbytes)
- Movie of a
dinosaur from zippered range images of a plastic toy
(MPEG, 69 Kbytes)
- Movie of a
telephone handset from zippered range images
(MPEG, 110 Kbytes)
- Movies of a
lion created by zippering range images of a plastic toy,
with explanations
-
ZipPack Polygon Mesh Zippering Package